

JAGUAR LAND ROVER MUESTRA SUS AVANCES EN INVESTIGACIÓN SOBRE LA CONDUCCIÓN TODOTERRENO AUTONOMA
Jaguar Land Rover ha realizado una demostración de innovadoras tecnologías desarrolladas gracias a novedosas investigaciones que podrían permitir a los futuros vehículos autónomos circular sin conductor sobre cualquier superficie o terreno.
El proyecto de investigación de Jaguar Land Rover “AUTONOMOUS ALL-TERRAIN DRIVING” (Conducción Todoterreno Autónoma) ha supuesto una inversión de varios millones de libras y tiene como objetivo fabricar un vehículo sin conductor viable en todas las condiciones meteorológicas para cualquier entorno de conducción de la vida real, tanto en carreteras como en situaciones todoterreno.

Tony Harper, Head of Research de Jaguar Land Rover, declaró: “Nuestra investigación sobre todoterreno autónomo no consiste sólo en conseguir que un vehículo sin conductor pueda circular en carretera o en situaciones extremas todoterreno, consiste en ayudar tanto al conductor como al coche autónomo a circular con de la forma más segura sobre todo tipo de terreno o circunstancia de conducción.”
“No queremos limitar al asfalto las futuras tecnologías altamente automatizadas o totalmente autónomas. Queremos que el respaldo y la asistencia continúen aun cuando el vehículo circule fuera de la carretera. En el futuro, si lo que le gusta al conductor es disfrutar en las autopistas de la conducción autónoma, nosotros queremos que también pueda disfrutar de este sistema hasta el final de su trayecto, aunque este incluya pasar por caminos agrestes o con gravilla.”
“Ya sea en una carretera en construcción con conos y vehículos circulando en sentido contrario, en una carretera cubierta de nieve en las montañas o en un camino forestal lleno de barro, este avanzado sistema podría estar disponible tanto para el conductor como para el vehículo autónomo, y además el conductor tendrá la posibilidad de dejar que el vehículo tome el control si no estuviera seguro de saber cuál sería la mejor forma de enfrentarse a un obstáculo o a un peligro que se acerca. Somos los líderes mundiales en tecnologías todoterreno y estos proyectos de investigación ampliarán aún más este liderazgo”

Para que este nivel de capacidad todoterreno autónoma sea posible, los investigadores de Jaguar Land Rover están desarrollando tecnologías de sensores de última generación que serán los “ojos” del futuro vehículo autónomo. Puesto que los sensores están siempre activos y disponen de una mejor visibilidad que la del conductor, este avanzado sistema será capaz de proporcionar al vehículo los elevados niveles de inteligencia artificial necesarios para que el coche piense por sí mismo y planifique la ruta que debe tomar en cualquier superficie.
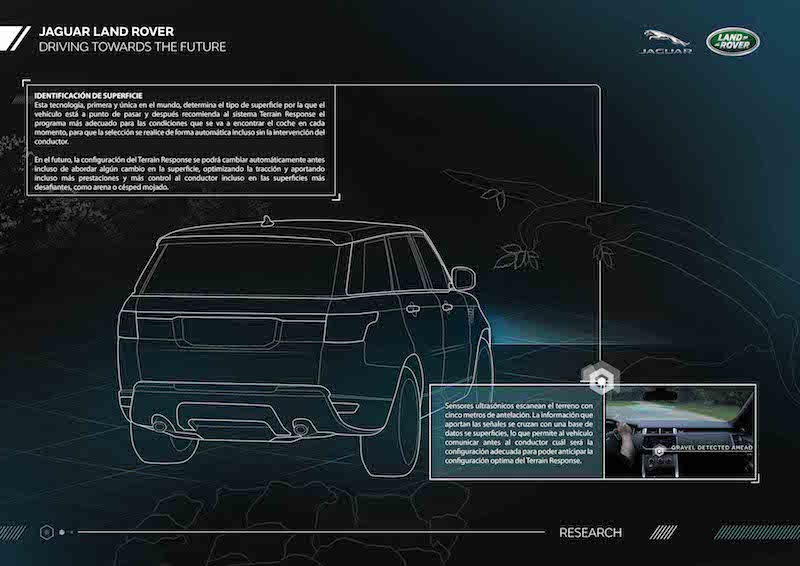
La investigación en IDENTIFICACIÓN DE SUPERFICIE Y SENSORES DE TRAYECTO EN 3D (Surface Identification And 3D Path Sesnsing) combina cámara, ultrasonido, radar y sensores LIDAR (para ofrecer al vehículo una visión de 360 grados) con sensores tan avanzados que permiten determinar las características de la superficie, hasta la anchura de un neumático, incluso si llueve o nieva, para planificar la ruta.
Tony Harper afirmó: “Lo principal para conseguir una conducción autónoma en cualquier superficie es aportar al vehículo la capacidad de detectar y predecir el trayecto en 3D que tiene por delante. Esto supone poder examinar y analizar tanto la superficie sobre la que se va a circular como los posibles peligros por encima o a ambos lados del vehículo. Por ejemplo, las barreras de aparcamiento, las raíces de los árboles y las rocas o ramas salientes, así como los componentes y la topografía del terreno sobre el que se va a circular”.
Los sensores ultrasónicos pueden identificar las condiciones de la superficie al examinar hasta cinco metros por delante del vehículo, por lo que las configuraciones de Terrain Response podrán modificarse automáticamente antes de que el coche pase de asfalto a nieve, o de hierba a arena. De esta forma, se optimiza el rendimiento todoterreno sin pérdida de impulso ni control.
Para completar el trayecto en 3D, es necesario identificar elementos como ramas salientes o barreras elevadas de aparcamiento para determinar si la ruta por la que se va a circular está despejada. OVERHEAD CLEARANCE ASSIST (Control de distancia de alturas) utiliza una tecnología estereoscópica para analizar el trayecto por delante para detectar obstáculos elevados. El conductor programa el sistema con la altura del vehículo, que puede incluir equipaje o bicicletas en la baca, y el vehículo avisa al conductor si no hay espacio suficiente con un sencillo mensaje en la pantalla táctil de infoentretenimiento.
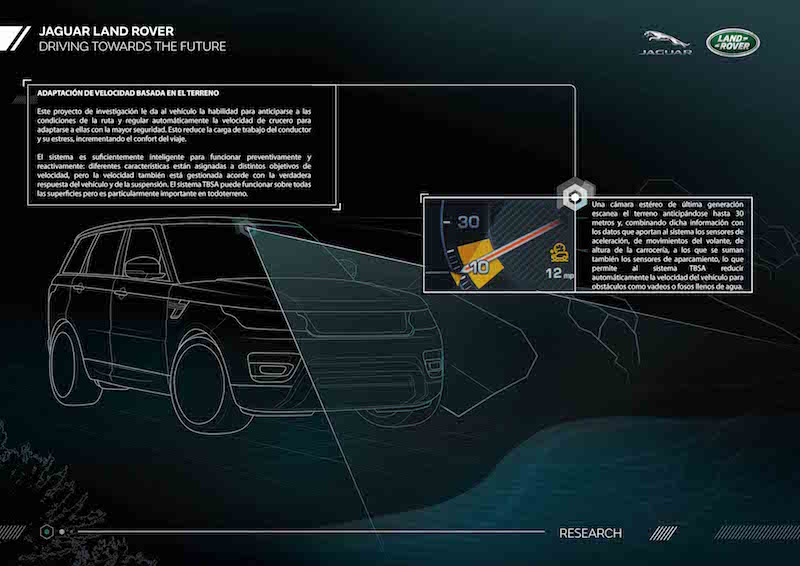
Los sensores también pueden utilizarse para examinar los elementos escarpados de la carretera o del camino por donde se va a circular y adaptar la velocidad del vehículo según sea necesario. TERRAIN-BASED SPEED ADAPTION (TBSA) (Control de la velocidad según las superficies) utiliza cámaras para detectar baches, incluidas superficies desiguales y ondulantes, así como las carreteras muy escabrosas, las irregularidades e, incluso, el agua estancada. Gracias a todo ellos, el vehículo dispondrá de la inteligencia suficiente para predecir el impacto potencial de estas superficies en la conducción y adaptar de manera automática la velocidad para preservar el confort de los pasajeros.
Otro elemento clave del éxito de la conducción todoterreno autónoma es la capacidad de los vehículos de comunicarse entre ellos, en especial, si están fuera del campo de visión por una curva o al otro lado de un obstáculo.
En una demostración todoterreno pionera en el mundo, Jaguar Land Rover ha conectado dos Range Rover Sport mediante la innovadora tecnología DSRC (Dedicated Short Range Communications), comunicaciones de corto alcance para crear un CONVOY CONECTADO TODOTERRENO. Este sistema de comunicaciones inalámbrico de vehículo a vehículo (V2V) comparte entre ambos de forma instantánea información como la ubicación del vehículo, los deslizamientos, los cambios en la altura de la suspensión y en la articulación de los ejes, así como las configuraciones de All-Terrain Progress Control (ATPC) y Terrain Response.
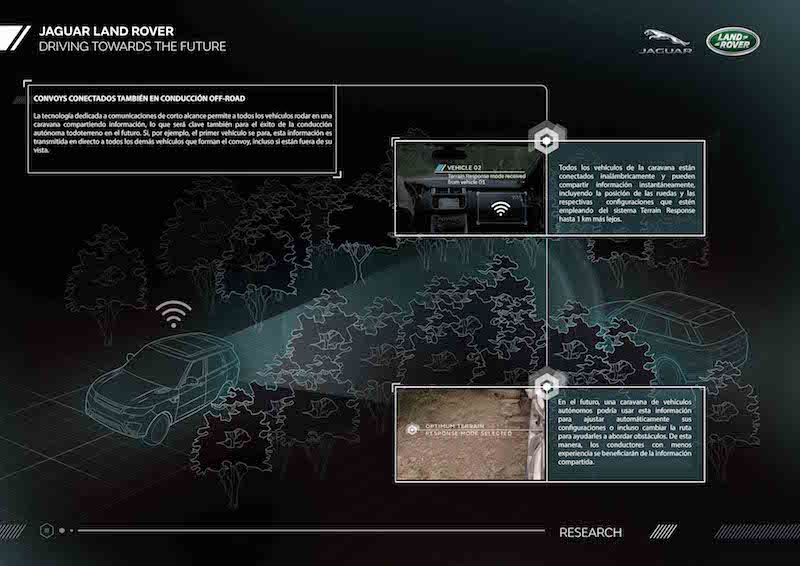
Tony Harper afirmó: “Este sistema de comunicación V2V puede conectar sin problemas un convoy de vehículos en cualquier todoterreno. Si un vehículo se para, el resto de integrantes del convoy recibirá un aviso. Por ejemplo, si un vehículo se queda atrapado al hundirse en un agujero o derrapa al toparse con una roca resbaladiza, esta información se transmite a todos los demás vehículos. En el futuro, los convoys de vehículos autónomos podrían utilizar estos datos para ajustar automáticamente su configuración o incluso cambiar de ruta para evitar un obstáculo.”
“También podrá servir para disfrutar al máximo de un safari fotográfico: el primer vehículo podrá comunicar al siguiente vehículo los lugares donde reducir la velocidad o detenerse para hacer las mejores fotografías”.